
Strategic development of materials and systems
February 26, 2021
Inflation targeting regime: Discretion vs. Fixed rule.
February 27, 2021
Executive Summary
Estimating driver behaviour using simulation tools is considered to be one of the most influential practices among many scientists and researchers. Since the 19th century, many researchers have successfully proposed methods and models to analyze driving behaviour through traffic simulations. These research and development studies include various models categorised as integrated and independent, characteristic and behaviour recognition/measurement methods, vehicle driving safety analysis tools and traffic regulatory proposals.
In this paper, a detailed literature review was conducted to analyze the research work completed/published in the last many decades. Through research, it was indicated that the recent developments in driver behaviour simulation have been produced due to the integrated model design. Safety while driving has also been indicated to be one of the prime objectives of many researchers. Models developed to provide valuable data can be used to reduce traffic risks and accidents.
Among the many research papers reviewed to prepare this paper, four research articles were analyzed to study Driver Behavior in Traffic Simulation.



Introduction
The vehicle driving behaviour model can be described as the presentation response of the vehicle being derived under various traffic conditions. Driving behaviour models and simulations are developed to estimate the possible flow of traffic by analyzing the flow characteristics of a group of vehicles. The models use variables such as speed, acceleration, lane changing, safety and another variable such as brake application and characteristics of aggregated traffic flow. The application of these models also includes safety analyses and capacity estimates.
Much research has been conducted in the past and various driving models were developed. Models such as described by Rothery in 1997 presented the vehicle behaviour while it is following a leader vehicle. More recently, models have been developed through microscopic traffic simulations which presented acceleration models, and unconditional driver behaviour concerning following a leader vehicle. Accelerations models (Ahmed, 1999; Zhang et al., 1998; Yang, 1996) defined models which considered the driving behaviours concerning lane changing, emergency, free flow and car following such as acceleration/deceleration and reactivations. The driving regimes considered in these papers were modelled independently, such as for driver/vehicle under acceleration focus on attaining the desired speed.
Research conducted by Toledo et al, published in 2007 developed and implemented methods of integrated driving behaviour modelling. This research presented the models which were integrated with short-term goals and plans. It was assumed that the driver seeks to complete the short-term goals, such as lane changing, by attaining the short-term plan of achieving a target gap between the vehicles. The driver then facilitated the plan by acceleration and deceleration. The research captured such dependencies and estimated an integrated model.
Methods which could capture these variables and decisions were discussed and analyzed in detail. The driver’s capability of planning plays a key role in the application of these methods. The interdependencies in many cases are conditional to the decision levels, for example, if a driver plans to change the lane, only then the drive implies the acceleration or deceleration process. Therefore the specification of the lower level decision is integrated into the higher level decisions, which eventually captures the influence of interdependencies.
Both the mandatory lane changing and discretionary lane changing behaviours were integrated and implemented in a single model/framework, which allows balancing lane change considerations. Similarly, for accelerations, various possible driver behaviours were considered to develop an integrated model. Possibilities of acceleration concerning attaining the target gap, changing the lane and/or keeping up with the leading vehicle speed were considered. The framework adopted for acceleration was such that it could react differently for each case. Specifications such as the reaction time headway threshold were implied in the model.
Furthermore, case studies completed in the paper showed that further developments are required for specific acceleration cases. Following are the results obtained for tariff speed again period for two locations UK network of Southampton.
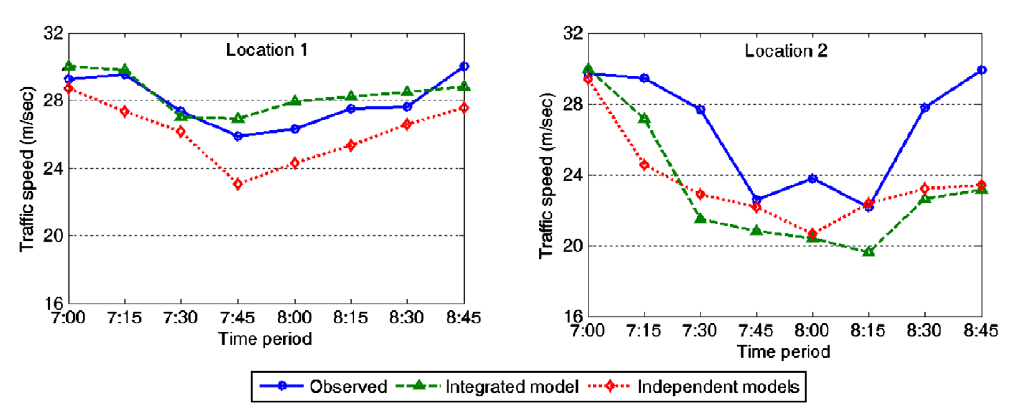
Figure-1: Case study results for the two locations (Source: Toledo et al, 2007)
From the results, it can be seen that the traffic speeds are higher in integrated models, which is because of faster congestion built-up rates with independent models in comparison with the observed model and integrated model. Furthermore, it can be noticed that simulated traffic in independent models takes longer to recover the lost speed. The case studies showed that the integrated driving behaviour model can perform better than the independent models developed for accelerations and lane changing.
Apart from the traffic flow, much consideration is given to driver safety. Deery and Fildes (1999) presented research analyses on risk perception and young and beginner sub-types characteristics. Many young drivers around the globe are found to be involved in traffic crashes, and young driver safety has been discussed on many platforms in the recent past. Research conducted (by Mayhew & Simpson, 1995) showed that young drivers’ performance is in many ways inferior as compared to experienced drivers. The critical lack of skills in novice drivers is the perception of hazards, and lack of vehicle control concerning response requirements and calibration.
Studies further show that novice drivers are inclined to adopt more hazardous/risky driving styles. Data presented in many research articles (Evans and Wasielewski, 1983; Wasielewski, 1984) presented that young drivers tend to leave a shorter gap between the vehicles i.e. the gap between the subject vehicle and the leading vehicle, and driving the vehicles at faster speeds.
The research completed by Deery and Fildes (1999) included two related studies in which personality and driving-related measures, and the driving performance of the young divers were analyzed through simulations. Using the five distinct sub-classes under analyses
Table-1; Results of five distinct sub-classes (Source: Hamish Deery and Fildes, 1999)
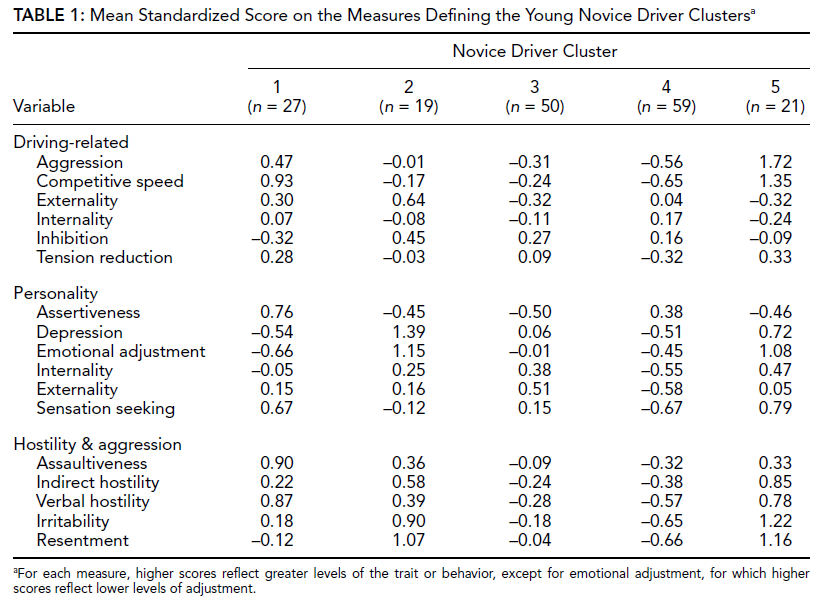
The results presented in Table 1 show that for each sub-class, the measures of the variables are different. These results show the natural measured variations for all driver clusters. The following figure-2 the results of average speed in km/h against the distance from the point of collision. Use of various average speeds and different ranges of distances from the point of the collision was used to produce the results shown below
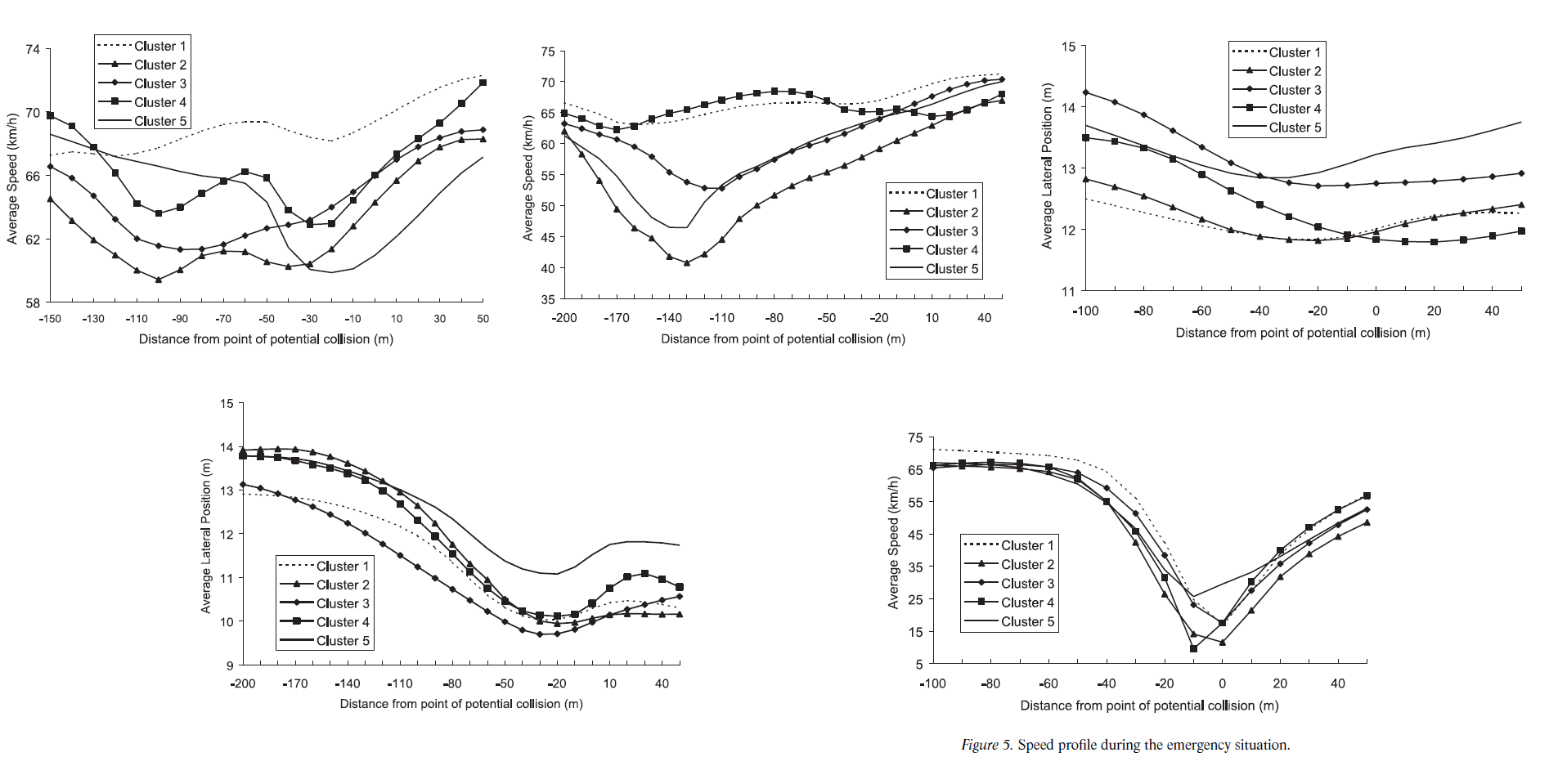
Figure-2: Results of five distinct sub-classes (Source: Deery and Fildes, 1999)
The results of the research indicated that the group of young/novice drivers cannot be considered homogeneous. The group of drivers was categorized into different sub-types, five in total, which were based upon the personality level, attitude towards driving and hostility/aggression measures. The research conducted showed that the group sub-types of behaviour differs concerning attitude, style of driving, accident involvement/record, response to risks, and risk perception. These results are considered to be persistent with various other research papers such as those Jessor, 1987 and Wilson & Jonah, 1988.
Conclusion
Although the integrated driving behaviour model can be considered to be advantageous in many applications, however, these models are quite complex and require intense computational input in designing the simulations. Research conducted by various researchers showed that the calibration required in modelling the driver’s behaviour can be completed using computer simulations. This simulation can be completed using disaggregated data which defines the behaviour model. Specific characteristics are integrated into the model parameters to complete the calibration process using the standardized aggregated data. The safety of the drivers is dependent upon many variables including the experience of the divers. The applications such as ‘IVDRs’ can be used to obtain important information on drivers’ behaviours concerning their safety. Case studies analyses show that safety is dependent upon various dependencies, and can be improved through applications of a set of optimized regulations.
However, the results shown in various research papers suggest that further research and design are required to enhance the component model performances through an optimized set of specifications.


References
Ahmed, K.I., 1999. Modelling drivers acceleration and lane changing behaviours, PhD thesis. Department of Civil and Environmental
Engineering, MIT.
Ahmed, K.I., Ben-Akiva, M., Koutsopoulos, H.N., and Mishalani, R.G., 1996. Models of freeway lane changing and gap acceptance
behaviour. In: Proceedings of the 13th International Symposium on the Theory of Traffic Flow and Transportation, pp. 501–515.
Zhang, Y., Owen, L.E., Clark, J.E., 1998. A multi-regime approach for microscopic traffic simulation. Transportation Research Board, 77th Annual Meeting.
Yang, Q., Koutsopoulos, H.N., Ben-Akiva, M., 2000. Simulation laboratory for evaluating dynamic traffic management systems.
Transportation Research Record 1710, 122–130.
Toledo,T., Koutsopoulos, H.N. and Ben-Akiva, M., 2007. Integrated Driving Behavior Modeling. Transportation Research Part C 15.
Deery, H.A. and Fildes, B.N., 1999. Young Novice Driver Subtypes: Relationship to High-Risk Behavior, Traffic Accident. Record, and Simulator Driving Performance. Human Factors: The Journal of the Human Factors and Ergonomics Society 1999 41: 628.
Jensen, M., Alexander, K. and Wagner, J., 2011. Analysis of in-vehicle driver behaviour data for improved safety. Int. J. Vehicle Safety, Vol. 5, No. 3, 2011
Kuge, N., Yamamura, T., Shimoyama, O. and Liu, A., 1998. A Driver Behavior Recognition Method Based on a Driver Model Framework. Society of Automotive Engineers, Inc. 2000-01-0349
Rothery, R.W., 1997. Car-following models. In: Gartner, N.H., Messer, C.J., Rathi, A.K. (Eds.), Monograph of Traffic Flow Theory.
Mayhew, D. R., & Simpson, H. M. (1995). The role of driving
experience: Implications for training and licensing of new drivers.
Toronto, Canada: Insurance Bureau of Canada
Evans, L., & Wasielewski, P. (1983). Risky driving related to driver
and vehicle characteristics. Accident Analysis and Prevention,
15, 121–136.
Wasielewski, P. (1984). Speed as a measure of driver risk: Observed
speed versus driver and vehicle characteristics. Accident
Analysis and Prevention, 16, 89–103
Get 3+ Free Dissertation Topics within 24 hours?
A Literature Review