PLANNING PROPOSAL
December 23, 2020
BIM in Design Coordination
December 23, 2020Chapter I- Introduction
Introduction
The issues of severe traffic congestion and environmental pollution from transportation and other constructions have been increased manifolds in past decades, especially in developed countries of Europe and America. Building larger and wider roads networks is ceased to be an innovative option to allow traffic flow and to control the greenhouse gases emissions. Transportation systems need further technological transformations to achieve sustainability and efficiency to meet the requirements of twenty-first century, Though, various researchers around the globe have emphasised on the development of fast and electronically controlled transportation systems since the mid of twentieth century, but implementation to mega scale projects are still in testing phases (Halle, 2005). One of the viable solutions proposed in the recent studies is the creation of Automated Highway Systems (AHS) to allow seamless flow of interconnected vehicles at great speed with a small proximity (Hamouda et al., 2009).
The AHS systems can revolutionize the inter-relation between the specifically engineered infrastructure and completely automated vehicles. The concept of this systems proposes complete automation of highway systems where complete control is transformed to simulated model through driverless vehicles and development of smart highways (Hamouda et al 2009). The multiple benefits of AHS as considered by various stakeholders includes fuel consumption reduction, traffic congestion relief, and more safety for human lives; a highly sustainable system for the future generation (Featherstone and Lowson, 2004). On the other hand, the challenges such as heavy costs, infrastructure issues, design challenges, and human acceptance posed difficulties in implementation of AHS on large scales. Another important aspect is the impact of these AHS on the designing and infrastructure of transportation system in civil engineering.
Furthermore, the need of AHS is increasing due to the rapid increase of population globally. According to El Nasser (2011), the world population has become more than 7 billion and doubled up in last 40 years only. At this rate of growth, the population is expected to become 14 billion by the end of twenty first century. Therefore, creation of sustainable infrastructure of transportation can be considered as a global requirement. Transportation modification will revolutionise the processes of commutation, supply chain management, and utilization of remote resources. Additionally, the rapid increase in vehicles in develop countries need Advanced Driver Assistance (ADA) systems on the highways to support the smooth and error free transportation on long routes. Hence, according to Heaslip et al (2011), the development of AHS not only includes the technological aspects such as electronic control systems, but also relies heavily on road sensors and indications as well as human and sociological aspects of drivers training and acceptance of these automated models.
This research is based on evaluation of the various challenges and opportunities of AHS in developed countries and analyses the impacts of these transformations on the design and infrastructure aspects in transportation systems. This chapter introduces the basic concept and background of AHS. Furthermore, aim and objectives, background, research questions, and structure of the dissertation are components of this chapter.



Background
An Automated Highway System (AHS) can be defined as an electronically integrated vehicles and road system that provides an automatic transportation system for vehicles. The sensors implemented in the highway are linked with the vehicle transmission systems and can act as the visual and auditory senses of vehicles. The concept of an Automated Highway is not a novel idea but first presented in 1939 General Motor show and since then it has been a hot research topic in the engineering world (Horowitz &Varaiya, 2000; Ferlis 2007).
Apart from designing the appropriate sensors, connected vehicles with same transmission frequencies, and information technology support to these AHS, there will be major changes observed in infrastructure of transport systems and principles of civil engineering currently used in roads making (Robinson et al 2010). AHS synchronizes the wireless communications among automobiles and infrastructure with in-vehicle devices. In this manner, AHS being driven by computer-control is a comprehensive replacement system for a driver. Vehicles can be engineered into platoons/smart-sets which allows for as constant conversation of information regarding acceleration, braking speed, and obstacles and platoons can be inter-connected in communication networks (Featherstone and Lowson, 2004).
Furthermore, the study of Bergenhem et al (2010) asserted that using three distinct control systems enables platoon operation by providing a harmless driving without a driver. Longitudinal control structure in the vehicles maintains speed and spacing accuracy by using radio/electromagnetic communication between vehicles. A smooth travel-course is provided by the running of the platoon with same consistent speed. This system increases the highway capacity and allows small spacing among the vehicles. To keep the car in the desired lane, a lateral control system (or steering control system), located on the infrastructure and the cars utilizes sensors. Lastly, faults in the sensors on the vehicles are detected and handled by a fault management system. Consequently, when a failure is identified in a vehicle, the crash of cars of platoon is avoided by the fault management system which is activated and places the other vehicles of the platoon under control (Bergenhem et al 2010).
In general, in-vehicle technology is currently used for Intelligent Transport Systems (ITS) implementation on passenger vehicles. The future ITS applications are expected to be based on a mixture of in-vehicle and infrastructure technology through which an initial system of AHS may slowly evolve. For this reason, infrastructure providers must collaborate with ITS designers and vehicle producers so that a broader implementation of AHS can be achieved (Transport Vision 2003). Though, the possible form of platoons functioning in an AHS cannot be anticipated to be materializing any earlier than 2030, because for a wide implementation some challenges linked with standardization, interoperability, and social acceptance are desired to be determined. The implementation of ITS through borders or national domains is prevented by the absence of interoperability of ITS, particularly for applications based on infrastructure, established at local or regional levels. European Union (EU) intervention is consequently prerequisite for addressing interoperability and standardization concerns (European Union, 2010).
Rationale for Research
Due to the rapidly increasing urban transport pressures and increase in consumer vehicles, the future decades can prove to be critical survival tenure for the highways system in developed countries such as UK. The mode of highway travel is highly affected by the automation of vehicles, more advanced automobile technologies, and enhancement of capacity and infrastructure of Highways (Schonfeld, 2010). Furthermore, the factors such as increasing rate of highway accidents due to negligence or inefficiency of drivers, fuel costs, traffic congestion, and traffic delays caused highway travel cumbersome in recent years. Furthermore, there has been a huge emphasis on the development of sustainable infrastructure models of highways, for which a sustainable pathway for the years 2030 and 2050 has been proposed in various studies. The Highway authority has already presumed working on some of these proposals, which includes sustainable development and construction of roads. These developments along with the concept of the AHS can have a significant impact on the infrastructure of civil engineering procedures. Hence these concepts provide an interesting topic of research, which is why this topic has been selected for this study
Research Aim
The aim of research is to evaluate and explore the challenges and factors affecting the designing and implementation of automated highway systems (AHS) with respect to the civil engineering principles and infrastructure of AHS. Apart from the development of automated vehicles and the impact of AHS on vehicle designs, the impact of future highway infrastructure and principles of civil engineering is also an important area to explore.
Research Objectives and Question
The dissertation will proceed in view of the subsequent main objectives:
- To identify projected merits and challenges of AHS in transportation system.
- To develop a theoretical framework to determine the impacts of these AHS on civil engineering principles and subsequent designing parameters.
- To analyse the opinions of consultants and professionals related to the applicability and impact of AHS on present day transportation system of UK.
- To determine the stakeholders that can be affected due to the design and infrastructure changes in the present highway system due to the implementation of AHS in current transportation systems.
- To recommend certain strategies that can assist the consultants and civil engineers in creating the positive impact of AHS on the infrastructure and transportation system
Hence, in view of the above described objectives, following research question is formed:
What is the impact of automated highway systems (AHS) establishment on infrastructure and civil engineering principles in UK and how these impacts can change the present transport system of UK in the years to come?
Structure of Thesis
The thesis is subdivided in six chapters according to the standardized presentation of a research report. The first chapter introduced the topic in detail and stated the research rationale, aim, and objectives in detail. The second chapter is comprised on the literature review of AHS and its implications in revolutionising the concept of transportation in developed countries. The chapter followed is the explanation of research methodology adopted in this research. The research design, strategies, and data collection and analysis methods are discussed in this chapter. The fourth chapter is based on the data collection and analysis for the research with the help of statistical procedures. The next chapter is the discussion of the analysed data with the help of reviewed literature, which assisted the researcher to put forward recommendations. The concluding chapter of the thesis is comprised on the conclusion and implications of the research to the future studies.
Chapter II- Literature Review
Introduction
This chapter provides a critical review of theories and scholarly articles related to AHS benefits and challenges. The issues of infrastructure and design of AHS has also been explored through this literature. This critical review of literature forms the theoretical framework for the current study.
Automated Highway Systems (AHS) Development
The concept of an automated highway system lies in the category of “Intelligent Vehicle-Highway Systems (IVHS)” (Carbaugh et al 1998), which is also termed as Information Technology Systems (ITS) planned/proposed to be regularized till 2030 in developed countries such UK. According to Guldner et al (2000), despite all benefits and efforts of planners, the idea of AHS is yet to be materialized in the world. In this context, various studies and proposals are found that addresses the important actions to be taken to develop such a system (Guldner et al, 1999; Schonfeld, 2010). According to Sinha, K., &Labi, S. (2007), a properly invented and designed automated highway system would adequately address the traffic congestion, safety from accidents, speed controls, fuel costs, and other problems that are the main issues on highways.
With the AHS applications capacity improvement is greatly higher. Until the vehicles reach the least safe distance, the separation among fully automated vehicles are considerably reduced. As a result more vehicles come in a given lane. For instance, a research of PATH (Partners of Advanced Transit and Highways) research program considers a platoon based on eight-cars with constant separation of 6.5 meters at every point in the speed limit up to full highway speed. Studies conducted by Michael et al., Tsao et al. (1994) has reported even smaller intra-platoon spacing, considerably dependent upon the relative speed. The challenge posed on this project is that higher speeds only enables a small capacity increase, and thus needs larger headways to operate effectively.
Another important development towards establishment of AHS is the SARTRE (Safe Road Trains for the Environment) project. This project is for three years duration and was funded by European Commission within the network of ‘Framework 7 program’. The institutes from UK (Ricardo UK Ltd), Spain (Idiada and RobotikerTecnalia), Germany (Kraftfahrwesen Aachen (IKA) institute), Sweden (SP Technical Research Institute), and Volvo Car Corporation were the major partners in this research project. SARTRE program’s basic objective is to revolutionize the concepts of personal car driving with the replacement of environmental friendly and safe vehicle trains on modified and unmodified highways. According to Davila (2010), SARTRE explored the challenges of vehicles integration on highways and the supportive technologies needed to operate platoons on automated highways in future. The exploration of human factor involved in driving and using these trains was an important development towards designing of AHS (Bergenhem 2010). Robinson (2010) added that the addition of global and local automated control systems on highways will be supported by wireless networks in future technologies as happened in aviation sector.
Safety and Speed Considerations in AHS
The automatic recovery plans driven from the AHS control systems – lateral, longitudinal and fault management systems, can be implemented in order to guarantee the safety of platoons in the occurrence of failure that affects the environment of vehicle and vehicle itself. Additionally, the structure is intended to make actions and permit the car to relieve/exit from its platoon without any misshaping, in an instance of a failure that affects a vehicle in the platoon (Hamouda et al 2009).
Furthermore, AHS offers the cars with situations of constant cruise speed and it even out traffic flow. Stop-and-go operations and in adequacies due to carelessness, merging, weaving, and lane changing can be avoided and thus, traffic equilibrium can be achieved (Halle 2004). Studies considering automated highway capacity have resulted in the vehicle capacities up to 8000 veh/h/l. With a vehicle intra-platoon spacing of 0.1 seconds and length of 5m, this high capacity agrees to 16-vehicles platoon (Featherstone 2004). To account for departure and entrance of vehicles to and from the committed AHS lane, it has been suggested that this theoretical value is decreased by 20-25% so that the capacity values of 6,400 veh/h/l can be achieved (Featherstone 2004).
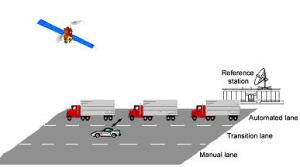
The intra-platoon (between vehicles), inter platoon distances, platoon size, vehicle combination, the frequency of entry, exit of vehicles from platoons and the duration of the route functioned in the platoons are some of the primary factors on which the level of capacity improvement intensely relies on. Platoon size per platoon ranges from 5 to 20 vehicles. The necessity to attain communication among the leader of platoon and all cohorts in the platoon, constrains the size of the platoon (Tsao et al 1994). Due to the inferior performance of heavier vehicles, the attainable capacity can be significantly reduced by the introduction of vehicle mix option. The vehicle mix can be achieved by introduction of small trucks and lorries in the platoons of passenger cars.(Kanaris et al 1996). Lastly, to determine the capacity improvement, the duration of the operated trip in AHS is significant, with frequent entries and exits and small trip lengths restraining increase in capacity. According to Psaraki and Pagoni (2011), the AHS can be considered to be applied in 50%-60% of the European highways’ high priority corridors, where long route journeys intended for human driven vehicles and one lane is committed for AHS operations, an example of which in the figure below;
Sustainability and Infrastructural Impact
The development of automated highway system (AHS) is one of the advanced road transport sustainable solutions as the presence of automated trains is already observed since many decades in UK. On the other hand, the impact of these automated highways, which are proposed to be operational in future, will be significant on the civil engineering procedures and designing techniques. Since there has been emphasis on the sustainable developments in civil engineering infrastructure, the AHS can integrate the proposed sustainable pathway in the development of highway systems. These include the use of sustainable and re-usable materials for construction, enhancement in overall efficiency and productivity as well as integration of smart control systems. These developments are expected to have a significant impact on the traditional methods of highways construction techniques currently pursued in the field of civil engineering
Furthermore, the potential of Driver assistance systems (DAS) applications can significantly improve the sustainability through higher fuel efficiency for reducing rapid speed changes of vehicles for smooth traffic flow on AHS. The decrease and consistency of speeds enables the positive impacts of Intelligent Speed Adaptations (ISA) on the environment. Similarly, constant speed can be maintained by Automatic Cruise Control (ACC) that make ‘speed-ups’ and unexpected braking preventable. For other DAS for example lane departure warning (LDW), lane changer assistant (LCA), and electronic call (eCall). Furthermore, CO2 emission reduction originates as an indirect benefit of congestion decrease and safety improvements that support the seamless vehicles control on AHS. As reported by Klunder et al.(2009) and Halle (2004), around 0.5-10% CO2 emissions decrease are found for ACC. Moreover, Klunder et al.(2009) argued that queue formation can be avoided in the highway system and mishaps can be reduced by decreasing the aggregate of congestion and emissions produced. A 2-5% decrease in CO2 emissions can be achieved by ISA deployment (Carsten and Fowkes 2000; Regan et al 2006). Strong prospective on fuel consumption and CO2 emissions is not shown by other DAS applications for example ABS.
Besides the capacity of the longitudinal control of the AHS, reduction in fuel/gas consumption can be achieved as a consequence of the exclusive platoon configuration for reducing the severity of rapid speed changes and to make traffic flow smoother. A noteworthy decrease in aerodynamic drag for all of the vehicles including both leader and cohorts can be reduced by optimized spacing among platoon cars. The fuel consumption and CO2 emissions is estimated to be reduced by 15-25% with the application of AHS (Browand and Michaelian 2000). According to the Climate Group (2008), the fuel burnt and transport emissions are reduced by 16% due to the decrease in delays and removal of stops attained by CVO.
However, all these techniques and their integration to the new construction of highways necessitate the development of automated highways that incorporate and respond efficiently to these system requirements. Another important need is the integration of information technology to extent that the overall current norms of road construction can be revised and probably the complete method of road construction techniques can be amended. This can propose and extraordinary challenge to the highway authority / agency, for which the researchers will have to work closely with the stakeholders so that the development of such systems is kept on proposed pathway. From the literature reviewed, it was observed that this practice needs to be undertaken at the time of the testing phase of AHS as it would require considerable engineering and effort from the stakeholders in the years to come.
Challenges in AHS Development
Different drawbacks of various levels must be considered at this point. In consideration of a highway where people are not permitted to drive their own vehicles any longer, one can observe the natural hindrance and distrust of such system. Open acknowledgment upon driver-less highways, the need for new laws for this kind of driving, the connections with the travellers’ human elements, the potential for higher private expenses of vehicles fit for working in both, driver less and non-driver less frameworks are some of the considerable hindrances to this system (Hayes 2011). More importantly, the development of infrastructure that can lead to support the smart technologies can prove to be one major hindrance in the application of this system
- Roadway Development and Management
In Ran et al. (1997), the potential cost saving advantage investigations on the development of automated roadway frameworks was presented. As per this investigative analysis, administration frameworks will cost 5.866 euro for each year per Km of the road for such system. Applying these expenses for more than 24,200 km (the quantity of path kilometres of the HWN), the outcome is 0.1 billion euro (Ran et al, 1997). Because of expectations to learn and adapt, a diminishment in cost of 20% is accepted for the lower expenses in the transfer speed. However, these estimations may not include the implication related to the recent development in smart systems as the study was complete more than a decade ago, and the precise estimate of developing a modern state of the road network for AHS is yet to be investigated.
- User costs/in-vehicle hardware
The costs incurred in the incorporation / integration of hardware in vehicles on AHS are another drawback. The in-vehicle hardware includes vehicle parallel control (keep straight path), vehicle longitudinal control (keep separation), vehicle course direction and a vehicle framework for AHS. Costs for these AHS frameworks are assessed to be somewhere around 2000 -4000 Euro for each vehicle (Abele et al. (2005). In the same study, a deterioration time of 12 years is used for the induced hardware. Duplication of the vehicle costs with all vehicles and partition by the devaluation period gives costs evaluations of 1.9 – 3.8 billion euro.
- Social consideration and second-hand autos
Lucas (2006) highlights two UK considerations on in which there is an exclusive requirement that innovation will tackle the greater part of the natural danger connected with auto based travel. The study identified the issue of the affordability of new vehicles for low income families to travel on AHS and the up gradation of old vehicles is not given proper consideration in the development of automated transport systems. As indicated by Lucas (2006) this implies fleet substitution will be slower than it preferably could be and that a portion of the natural advantages that could be acknowledged will be undermined by the development of second-hand auto proprietorship from this area. By actualizing strict guidelines or banning those second-hand autos, this issue could be resolved for AHS development.
(Literature Review to be completed/continued)
Chapter III-Methodology
This chapter discusses the research methods applied in this study. The strategy, data collection research philosophy, and analysis, and ethical concerns are analysed in this chapter.
Research Philosophy
Research philosophy or Paradigm is stated as the theoretical base to illustrate the research processes, methods and theoretical keystones (Elliott & Lukes, 2008; Saunders et al 2012). Positivism and Interpretivism philosophies are the most commonly used theories in research. As stated by Lather (2006) and Malhotra and Burks (2007), in research, the Positivism paradigm is established on the conditions to investigate the causes against their effects in any condition. The quantitative measurements of the variables involved in scientific way are the basis of this objective philosophy. On the contrary, Interpretivism explores more suitable for interpretation and more qualitative measurements of new or complicated phenomena and investigates the subject matter comprehensively (Hammersley2015; Collis and Hussey (2003). For this study the positivism research paradigm is selected to research over the effects of several defined elements of business governance for the particular research
Research Approach
According to Saunders et al (2012), the research approaches involved the plans and procedures taking into account the approaches of data collection, analysis and interpretation. Deduction and induction are the two main research approaches that are commonly employed in scientific research and obey the positivism and interpretivism philosophies respectively (Schwab, 2009). Deduction is the key approach applied ii this research because positivism is chosen as research philosophy. This method is selected with the support of using the quantitative data for testing the defined propositions and hypothesis in response to raised research question (Malhotra 2005; Bell 2010).
Deductive approach has been applied to the related literature and the engineering concepts of Advanced Highway Systems. However, lack of thorough and insight knowledge is the limitation of deductive methodology. Therefore, to attain the holistic approach, an inductive component of interviews will be undertaken in this research (Saunders et al., 2012; Sarankatos, 2003).
Research Strategy
Two extensive research techniques are used in this research: qualitative research and quantitative research. Quantitative research comprises of collecting measurable data, and significantly relies on the illustration of progresses in a statistical manner. On the other hand, qualitative methods are used in the situations / cases where the trends are not collected by using simple numerical indicators that are intended to be taken in the research (Silverman, 2010). In this research both quantitative and qualitative approaches are applied including questionnaires and interviews as the main tools for data collection. The qualitative research comprises of a more thorough analysis of phenomena approach, therefore, this approach is selected (Collis & Hussey, 2009). Furthermore, qualitative research has no limit to inflexible pre-defined variables in contrast to quantitative research. Relatively, it is open for including additional information that can be useful to the attainment of research aims, which is gathered from respondents (Silverman, 2010). The researcher is capable to conduct an investigation of complex issues through the use of qualitative method of research that might not be achieved by using quantitative methods.
On the other hand, within the limited time period, the quantitative data collection approaches assists in achievement of more objective data. A primary reaction regarding advertising campaigns, involving both emotional and rational applications was collected for preparation of the target market, from the sample containing advertising professionals and managers.
To gather the prerequisite quantitative data, the survey of professionals and consultants was conducted as it is accurate, simple, and less costly method; this additionally comprises of brief interviews with transportation experts and project managers (Malhotra and Burks 2007).
Sampling Method
In any research, the sampling method is based on sampling technique and sampling size. If database of participants is accessible and every participant has equivalent chance of getting selected, the probability sampling method is preferred, while, in the case of non-availability of database, limited access to participants with non-random sampling required, non-probability sampling is preferred (Bell 2010; Collis and Hussey 2014)
For this study, purposive sampling technique is used. Also, being less time consuming and requiring use of fewer resources, non-probability sampling design is favoured (Malhotra 2005; Cooper and Schindler 2003). The sample size comprising 30 respondents is used because of the issues in accessibility to participants, lack of time and together with conducting 2-3 interviews from experts.
Data Collection Method
- Survey method:
For gathering quantitative primary data from a particular sample, one of the most dominant, simple, and important way is the survey strategy. Survey strategy tool is employed to accomplish quantitative research for gathering data from large target population. The inability of providing comprehensive response in comparison to the qualitative interviews and its objective approach is the drawback of this strategy (Saunders et al 2009). For attaining the required information, surveys can be carried out via email, telephonic questionnaires and contacts which individually administered. Therefore, questionnaire has been proposed to be distributed physically as well as electronically (via e-mail), depending upon the convenience of the respondents. The questionnaire will be carefully drafted after a detailed review of the literature is completed, and specific multiple choice as well as descriptive questions will be included in the draft. Basic questions such as the following will be included in this questionnaire:
- As a practitioners and a part of the current highway systems, would you insist that there is a need to develop an Automated Highway System for the needs of the future?
- In your opinion, do you believe the users of the highways can accept and adopt to the changes AHS bring about?
- What are the expected changes that the implications of AHS systems would bring in the standard SOPs of the current civil engineering practices of highway?
- How can the practitioners successfully engineer this transformation? What is the role of the government? The impact on economy and the current infrastructure? AHS’s impact on sustainability? Various other but similar questions will be drafted for the questionnaire as well as interviews
- Interviews
The areas which are not critically addressed for problem explanation and literature review are to be addressed by interviews. In open interviews, generally, respondents are given a chance to state their personal views and comments regarding the under consideration issues (Yin 2003). Honesty of researcher, true interviewees, and appropriate addressing of the subject in discussion are significant for producing trustworthy and significant results for adhering to the ethical deliberations.
For this study, the project managers and experts were requested earlier to provide an appointment of about 15 to 20 minutes to respond to five interview questions. The key emphasis of these interviews will be on the execution, ideology, and outcomes and effects on the brand trust of the practice of rational and emotional requests.
Accessibility Issues
Several accessibility issues can be faced during this research such as problem related to the limited literature, accessible on the chosen subject, particularly concerning formal and informal mechanisms involved in business governance in UK. It can be difficult to access workers of chosen organisations for survey and interview in limited span of time (Saunders et al 2012). It may also prove to be difficult to access employees personally, so, an e-mail based study and individual interviews has been proposed to be completed. The access to respondents will be obtained through their company resources and through the departmental head of the company or business owners. Unavailability of respondents, postponement in replies of emails, and hesitance of providing information of their customers can be the main problems confronted during accessing these respondents.
Data Analysis Plan
SPSS or similar tool will be used to later analyse the quantitative data obtained through the survey questionnaire. Techniques of regression and correlation are to be applied for studying the relationship among the selected variable. Thematic analysis is to be applied in order to analyse the qualitative data from interviews.
Reliability and Validity
As Joppe (2000) suggested, the validity and reliability are two important factors in the credibility of research design and methods implemented during the study. Therefore, in this research, the validity is to be established through the selection of a representative sample, appropriate research instruments and strategies, and content validity in the research instruments used.
Nevertheless, the internal consistency of the information is the reliability; consequently, the matters in the questionnaires is to be formulated in a way as to recover consistent and reliable information. Also, quantitative analyses (using mathematical and statistical methods) and thematic analyses (using identified themes and discussion with reference to literature) are the effective and appropriate data analysis tools used to guarantee the correctness and dependability of outcomes. As stated by Cooper & Schindler (2009), the reasoning behind the collection of data by rational resources is the formation of the quality of the gathered information and along these lines also, it can assist in prospected research.
Ethical Issues
During this research the ethical barriers are to be given due importance. The knowledge about the aim and nature of the investigation is to be provided to the participants, as stated by Bell and Bryman (2007), this gives them correct interpretation of the data as it provides sureness in the confidentiality of the investigation. In order to avoid any confidentiality issue about the provided data, the respondents’ individual confidentiality of the private information is to be guaranteed. Prior to the gathering of data the participants are to be informed about the subject, nature and objective of the research work. Hence, it can be concluded that all moral concerns are to be taken into account while accompanying this investigation.
Research Limitation
With purpose of distinguishing the scope of research, there are a few particular impediments that are involved in this examination;
- UK has been selected as the geological area for this research; along these lines the discovering and the consequence of this study cannot be connected to different nations, as distinction exists in social standards relying upon the social areas.
- As this study is particularly taking into account the perspectives of professionals just in UK, therefore, the consequence of the study cannot be generalised.
- The results obtained from this research not be considered as 100% accurate, primarily because of the small sample size to be involved in this study. This is because of the researcher’s access to concerned professionals in construction industry is limited; hence, small sample size is used in this research for surveys and interviews. Moreover, this could also be due to the fact that data collected from the participants / practitioners present their personal views, and this may not be validated using a different methodology of research.
References
AASHTO, (2010). A Guide on Geometric Design of Highways and Streets, 6th Ed.,American Association of State Highway and Transportation Officials, Washington, DC
Ashley, S., (1998). Smart Cars and Automated Highways, the American Society of Mechanical Engineers.
Bergenhem, C., Huang, Q., Benmimoun, A., Robinson, T., 2010, Challenges of Platooning on Public Motorways, in Proceedings of the 17th ITS World Congress, SP Technical Research Institute of Sweden, October.
Browand, F. and Michaelian, M., (2000), Platoon Travel Saves Fuel… How much?, Intellimotion, 9(2), pp. 1-5, 11.
Bell, J. (2010), ‘Doing Your Research Project (Open up Study Skills)’, 5th ed, Open University Press;
Bell, E., & Bryman, A., (2007). Business research methods. 2nded.New York: Oxford University Press Inc.
Cooper, D. R.; Schindler, P. S., (2003), Business research methods, 8th edition, New York: Pearson Publishing
Carsten, O. and Fowkes, M., (2000), External Vehicle Speed Control: Executive Summary of Project Results, Leeds, UK, University of Leeds.
Carbaugh, J., Godbole, D., & Sengupta, R. (1998). Safety and capacity analysis of automated and manual highway systems. Transportation Research Part C, 69-99.
Collis, J., and Hussey, R., (2014). Business research: a practical guide for undergraduate and postgraduate students, 4thedn. Basingstoke: Palgrave Macmillan,
Elliott, J., & Lukes, D., (2008). Epistemology as ethics in research and policy: The use of case studies .Journal of Philosophy of Education, 42(S1), 87-119.
El Nasser, 2011, World population hits 7 billion, USA Today. Available online from: http://www.usatoday.com/news/world/story/2011-10-30/world-population-hitsseven-billion/51007670/1 [Accessed November 2015].
European Commission, (2002). Final Report of the eSafety Working Group on Road Safety, EC DG IST, Brussels
European Union (2010). EU Energy and Transport in Figures: Statistical Pocketbook 2010, Luxembourg, Publications’ Office of the European Union.
ESA, (2015). Available online from: http://www.esa.int/spaceinimages/Images/2000/10/Automated_highway_system [Accessed: January 12, 2015].
Featherstone, C. and Lowson, M. (2004), Viability and Benefits of Platooning in Automated Transport Systems, Deliverable of Cyber Cars Project.
Ferlis, R. A., (2007). The Dream of an Automated Highway. Public Roads
Guldner, J., Patwardhan, S., Tan, H.S., (1999). Coding of Road Information for Automated Highways. ‘Taylor & Francis Online’. [Online]. Available at: http://www.tandfonline.com/doi/abs/10.1080/10248079908903748#.VSe5zM5N3zI [Accessed: December 27, 2015].
Guldner, J., Patwardhan, S., Tan, H.S., Chen, C., Bougler, B., (2000). Lane changing with look-down reference systems on automated highways. ‘Science Direct’. [Online]. Available at: http://www.sciencedirect.com/science/article/pii/S0967066100000265 [Accessed: December 23, 2015]
Halle, S., (2005). Automated Highway Systems: Platoons of vehicles viewed as a multi-agent system, Master’s Thesis, Université Laval, Québec.
Hamouda, O., Kaâniche, M. and Kanoun, K., (2009). Safety Modeling and Evaluation of Automated Highway Systems, 39th Annual IEEE/IFIP International Conference on Dependable Systems and Networks (DSN-09),Lisbon, Portugal, pp.73-82.
Heaslip, K., Womack, K. C., &Muhs, J., (2011). Automated Electric Transportation: A Way to Meet America's Critical Issues. Leadership & Management in Engineering
Horowitz, R. &Varaiya, P., (2000). Control Design of an Automated Highway System. ‘Invited Paper’. [Online]. Available: http://www2.me.berkeley.edu/~horowitz/Publications_files/Papers_numbered/Journal/42j_Horowitz_Control_design_AHS_PIEEE00.pdf [Accessed: December 24, 2015].
Hammersley, M., (2015). An outline of methodological approaches. Retrieved July 4, 2015, from http://www.tlrp.org/capacity/rm/wt/hammersley/hammersley4.html
Joppe, M. (2000). The Research Process. [Online]. Available from: http://www.ryerson.ca/~mjoppe/rp.htm [Accessed December 12, 2015]
Lank, C., Haberstroh, M., &Wille, M., (2010). Inter action Between Human, Machine, and Environment in Automated Driving Systems. TRB 90th Annual Meeting Compendium of Papers DVD. Washington, DC: Transportation Research Board.
Klunder, G.A., Malone, K., Mak, J., Wilmink, I.R., Schirokoff, A., Sihvola, N., Holmén, C., Berger, A., de Lange,R., Roeterdink, W. and Kosmatopoulos, E., (2009), Impact of Information and Communication Technologies onEnergy Efficiency in Road Transport, Final Report, Delft, The Netherlands,.
Kanaris, A., Ioannou, P. and Ho, F., (1996). Spacing and Capacity Evaluations for different AHS concepts, California PATH Research Report UCB-ITS-PRR-96-30, Berkeley, University of California.
Lather, P., (2006). Paradigm proliferation as a good thing to think with: teaching research in education as a wild profusion. Journal of Qualitative Studies in Education, 19(1), 35-57.
Lucas, K. (2006). Providing transport for social inclusion within a framework for environmental justice in the UK. Transportation Research Part A, Policy and Practice, 40(10), 801-809.
Rosenberg, J. P., & Yates, P. M., (2007). Schematic representation of case study research designs. Journal of Advanced Nursing, 60(4), 447452.doi: 10.1111/j.1365-2648.2007.04385.x.
Malhotra, N. K., (2005). Marketing Research – An applied orientation, 5th International edition, New Jersey: Princeton
Malhotra, N. K.; Burks, D. F., (2007). Marketing research – An applied approach, 3rd European edition,
Michael, J.B., Godbole, D., Lygeros, J. and Sengupta, R., (1998). Capacity Analysis of Traffic Flow over a Singlelane Automated Highway System, Journal of Intelligent Transportation Systems, 4(1-2), pp. 49-80.
Mercedes Benz (2011). Mercedes Benz Tech Center: Assistance systems. Retrieved March 10, from:http://www3.mercedes-benz.com/mbcom_v4/gr/techcenter2009/en.html#/assistance/ overview [Accessed November, 2015].
PATH, (1998). Vehicle Platooning and Automated Highways, California Partners for Advanced Transit and Highways (PATH), Caltrans and NAHSC, accessed from http://www.path.berkeley.edu/PATH/Publications/Media/FactSheet/VPlatooning.pdf, [Accessed November, 2015].
Psaraki, V. and Pagoni, I., (2011). Transport Infrastructure Capacity Assessment: Road Passenger Transport. Deliverable D6.1, TOSCA project.
Partners for Advanced Transit and Highways (n.d). Vehicle platooning and automated highways, Berkeley, University of California.
Regan, M., Triggs, T.J., Young, K.L., Tomasevic, N., Mitsopoulos, E., Stephan, K. and Tingvall, C., (2006). On road evaluation of Intelligent Speed Adaptation, Following Distance Warning and Seatbelt Reminder Systems:Final Results of the TAC SafeCar Project, Australia, Monash University Accident Research Centre.
Robinson, T., Chan, E., and Coelingh, E., (2010). Operating Platoons on Public Motorways: An Introduction to the SARTRE Platooning Programme, in Proceedings of the 17th ITS World Congress, Ricardo UK Ltd, October.
Sinha, K., &Labi, S., (2007). Transportation Decision Making: Principles of Project Evaluation and Programming. Hoboken, NJ: John Wiley & Sons, Inc.
Schonfeld, E., (2010). Department of Outlandish Ideas: Build Solar Roadways. Retrieved December 2015, from GreenTech: http://techcrunch.com/2010/08/02/solar-roadways/
Saunders, M, Lewis, P. and Thornhill, A., (2012). Research Methods for Business Students (6th Ed), Pearson.
Sarantakos, S., (2003). Social research. Australia: Macmillan Education Australia Pty Ltd.
Schwab, D. P., (2004). Research Methods for Organisational Studies, 2nd ed. Mahwah, NJ: Lawrence Erlbaum Associates, Inc.
The Climate Group, (2008). ‘SMART 2020: Enabling the Low Carbon Economy in the Information Age’, Retrieved November 30, 2015 from: http://www.smart2020.org/_assets/ files/02_Smart2020Report.pdf [Accessed November, 2015].
Tsao, J., Hall, R. and Hongola, B. (1994). Capacity of Automated Highway Systems: Effect of Platooning and Barriers, California PATH Research Report UCB-ITS-PRR-93-26, Berkeley, University of California
USDOT, (2010). Transportation’s Role in Reducing U.S. Greenhouse Gas Emissions, United States Department of Transportation, Volume 1: Synthesis Report,.
Zwaneveld, P. J. and van Arem, B., (1997).Traffic effects of Automated Vehicle Guidance system. A literature survey, report INRO-VVG 1997-17, TNO Inro.


Chapter III-Methodology
The research methodology is based on the positivist philosophy and descriptive methods. The secondary data will be collected to understand the health and safety concerns oil and gas industry, with the focus on Iraq, from relevant and credible resources such journal articles, industry reports, labour legislations and online database. Primary research activity is the second phase of data collection. The primary data collection model includes qualitative and quantitative data in the form of survey and interviews. An e-mail based and personally administered survey from 50 random employees will be conducted, from up to 5 leading oil and gas companies in Iraq. The main elements to be considered in survey questionnaire and interviews from managers are as follows (these key factor will be considered for drafting the questionnaire)
- The demographics sample such as age, position, gender, experience etc.
- The working conditions and attitudes of oil and gas workers in Iraq, recent accidents, major H&S concerns in their opinion and lack of experience or expertise etc.
- Health and safety provisions and obligations of management towards establishment of safety culture and its implications
- Proactive policies of top management in resolving health and safety issues, barriers, success and practical issues
- Environment factors contribution including natural disasters, war, and terrorism
- The employees’ and/or employers opinions about occupational health and security conditions and suggestions for improvements
(More point will be added after undertaking a comprehensive review of literature in this area of research)
The analysis tools for quantitative data collected from survey will be regression and correlation and the findings will further discussed in line with the reviewed literature. The interviews will be analyzed with the help of thematic analysis to portray the important themes for further discussion. The issues of reliability and validity will also be discussed along with ethical considerations.
Chapter IV- Research Findings and Discussion
This chapter comprises the detailed quantitative survey data and interviews analyses with the help of selected statistical tools and thematic analysis techniques. Also, the results of the survey and interviews will be discussed in comparison with the reviewed literature.
Chapter V- Conclusions
This chapter contains the conclusion and recommendations in order to answer the research questions in view of the analysed data. The future implications and limitations of this study will also be a component of this chapter.
References
Blanchard, CM, 2009, ‗Iraq: oil and gas legislation, revenue sharing, and US Policy Congressional Research Service, no. 1437922066.
Broadbent, DG 2004, ‗Maximizing safety performance via leadership behaviors‘Paper presented at the 28th World Congress of Psychology, Beijing, China
Duijm, N. Fie´vez ,C. Gerbec, M. Hauptmanns, U. and Konstandinidou, M. 2008 ,Management of health, safety and environment in process industry, Safety Science, vol. 46,.
Powell, C., 2007, The perception of risk and risk taking behavior: implications for incident prevention strategies, Wilderness and Environmental Medicine, vol.18..
Zohar, D. and Luria, G. 2005 A multilevel model of safety climate: Cross-level relationships between organization and group-level climates’ Journal of Applied Psychology, vol.90.
Fraley, C. and Roberts, B. 2005 Patterns of continuity: A dynamic model for conceptualizing the stability of individual differences in psychological constructs across the life course, Psychological Review, vol. 112.
- Jaffe, 2006. Iraq’s oil sector: Issues and opportunities the James a. baker iii institute for public policy rice university.
- Kalha, 2009, Iraq, the current oil crisis and American mismanagement The Ultimate Prize - Oil and Saddam's Iraq, allied Publishers,
- Fattouh, 2007, How Secure Are Middle East Oil Supplies oxford institute for energy studies, WPM 33, September.
Fahlbruch, B. 2010. Integrating Human Factors in Safety and Reliability Approaches, 4th European-American Workshop on Reliability of NDE - Th.4.A.1,
Blanchard, C., 2009. Iraq: Oil and Gas Legislation, Revenue Sharing, and U.S. Policy, Congressional Research Service, PP.1-30, November 3
Mearns, K. and Yule, S. 2009, the role of national culture in determining safety Performance: Challenges for the global oil and gas industry’, Safety Perspective from management feedback complexity, presidia Earth and Planetary Science, vol. 1.
- Tharaldsen, K. Mearns, and K. Knudsen, 2010 Perspectives on safety: The impact of group membership, work factors and trust on safety performance in UK and Norwegian drilling company employees, Safety Science.vol.48.
- Ali, N. Abdullah, and C. Subramaniam, 2009.Management practice in safety Culture and its influence on workplace injury an industrial study in Malaysia, Disaster Prevention and Management Vol. 18 No. 5.
- Siu, D. Phillip, and T. Leung, 2004. Safety climate and safety performance among construction workers in Hong Kong the role of psychological Strains as mediators, Accident analysis and prevention vol. 36.
- Subramaniam, 2004, Human factors influencing fire safety measures, disaster Prevention and Management, vol.13,
Bellamy, L. Geyer T. and Wilkinson, J.2008 Development of a functional Model which integrates human factors, safety management systems and wider organizational issues, Safety Science, voI.46.
Fabiano, B. Curr, F. and Pastorino, R. 2004. A study of the relationship between Occupational injuries and firm size and type in the Italian industry, Safety Science, voI. 42.
Sawacha, E, Naoum, S & Fong, D 1999, ‗Factors affecting safety performance on construction sites‘, International Journal of Project Management, vol.17, no.5, pp. 309-315.
Lu, CS & Yang, CS 2010, ‗Safety leadership and safety behavior in container terminal operations‘, Safety Science, vol. 48, pp.123–134.
Kane, S 2010, ‗Iraq‘s oil politics where agreement might be found‘, United States Institute of Peace, no. 64, http://www.usip.org/files/resources/iraq_oil_pw64.pdf
Jiang, L, Yu, G, Li, Y & Li, F 2010, ‗Perceived colleagues‘ safety knowledge/behavior and safety performance: Safety climate as a moderator in a multilevel study‘, Accident Analysis and Prevention, vol. 42, pp.1468–1476.
Geldart, S, Smith, CA, Shannon, HS, & Lohfeld, L 2010, ‗Organizational practices and workplace health and safety: A cross-sectional study in manufacturing companies‘, Safety Science, vol. 48, no.5, pp. 562-569.
Cabrera, D, Fernaud, HE & D´ıaz, R 2007, ‗An evaluation of a new instrument to measure organizational safety culture values and practices‘, Accident Analysis and Prevention, vol.39, pp.1202–1211.
Griffin, M & Neal, A 2000, ‗Perceptions of Safety at Work: A Framework for Linking Safety Climate to Safety Performance, Knowledge, and Motivation‘, Journal of Occupational Health Psychology, vol. 5, pp. 347-358.
Khdair W. A., Shamsudin, F., and Subramaniam, C., 2011, A Proposed Relationship between Management Practices and Safety Performance in the Oil and Gas Industry in Iraq, World Review of Business Research Vol. 1. No. 3. July 2011. Pp. 27-45
ILO (International Labor Organization), 1997, Code of Protection Report of Protection of workers’ personal data. Available from: http://www.ilo.org/public/english/protection/condtrav/pdf/wc-code- 97.pdf
Vinodkumar, MN, & Bhasi, M2010, ‗Safety management practices and safety behavior: Assessing the mediating role of safety knowledge and motivation‘, Accident Analysis and Prevention, vol.42, pp. 2082–2093.
Get 3+ Free Dissertation Topics within 24 hours?